6ES7216-2BD23-0XB8参数详细图。
三角函数运算,指数运算和PID运算,还能进行复杂的矩阵运算,工作速度很快,能带的输入输出模块的数量很多,输入和输出模块的种类也很,这类可编程序控制器可以完成规模很大的控制任务,在联网中一般做主站使用,比如。德国SIEMENS公司生产的S7-400就属于这一类,结构整体式整体式结构的可编程序控制器把电源,CPU,存储器,I/O系统都集成plc结构在一个单元内,该单元叫做作基本单元,一个基本单元就是一台完整的PLC。控制点数不符合需要时,可再接扩展单元,整体式结构的特点是非常紧凑,体积小,成本低,安装方便,组合式组合式结构的可编程序控制器是把PLC系统的各个组成部分按功能分成plc组合若干个模块,如CPU模块。在弹出的 MS- DOS 窗口中输入 “ping 面板IP地址"(ping和IP地址之间有空格),看到丢失(lost)后的数字为 0 时,说明物理链路正常,如下图,如果丢失(lost)后的数字不等于0,那么需要重新检查两台设备的IP地址是否在同一网段,并且更换其他网线重新执行ping命令直到丢失
此时应该采取措施长电缆对地耦合电容的影响,避免变频器出力不够,所以变频器应放大一,两挡选择或在变频器的输出端安装输出电抗器,4,当变频器用于控制并联的几台电动机时,一定要考虑变频器到电动机的电缆的长度总和在变频器的容许范围内。如果超过规定值,要放大两挡来选择变频器,另外在此种情况下,变频器的控制方式只能为v/f控制方式,并且变频器无法实现电动机的过流,过载保护,此时,需在每台电动机侧加熔断器来实现保护,5,对于一些特殊的应用场合。如高环境温度,高开关频率,高海拔等,此时会引起变频器的降容,变频器需放大一挡选择,6,使用变频器控制高速电动机时,由于高速电动机的电抗小,会产生较多的高次谐波,而这些高次谐波会使变频器的输出。
也有少部分是因为主控板造成的,可以先换一块主控板试一试,否则问题肯定在电源驱动板部分了,2,上电后面板无显示(MM4变频器),面板下的指示灯[绿灯不亮,黄灯快闪],这种现象说明整流和开关电源工作基本正常。问题出在开关电源的某一路不正常(整流二极管击穿或开路,可以用万用表测量开关电源的几路整流二极管,很容易发现问题,换一个相应的整流二极管问题就解决了,这种问题一般是二极管的耐压偏低,电源脉动冲击造成的,3.有时显示[F0022,F0001,A0501]不定(MM4),敲击机壳或动一动面板和主板时而能正。4,上电后显示[-----](MM4),一般是主控板问题,多数情况下换一块主控板问题就解决了,一般是因为外围控制线路有强电干扰造成主控板某些元件(如帖片电容,电阻等)损坏所至,或与主控板散热不好也有
在工业自动化控制领域,控制系统中设备的稳定运行需要电源。西门子SITOP电源在稳定性,可靠性方面有很严格的标准,有效的防止由于电源供电问题导致设备及生产线停止运行,从而保证了工厂运行的效率和客户利益的大化。
在西门子plc组成的控制系统中,有时根据实际需求,要选择一个合适的开关电源来对设备进行供电。本文下面就为您介绍一下开关电源的选型方法,供用户在使用过程中进行参考。
开关电源选型的选型主要考虑以下几个方面:
1、并联或串联工作
当一个电源不能满足所需的电压或电流范围时,可将两个或多个电源(或将同一电源的不同输出)并联或串联起来使用。在这种工作模式下,各电源模块间的稳压和控制电路之间的联系仍然存在,只不过一个电源作为主控方另一个电源作为受控方使用。
2、脉动与噪声
理想的直流电源应提供纯净的直流,然而总有一些干扰存在,比如在开关电源输出端口叠加的脉动电流和高频振荡。这两种干扰再加上电源本身产生的尖峰噪声使电源出现断续和随意的漂移。
3、过载保护
因为一个电源要供给不同的电路使用,这些电路的电流的流量可能是未知的,为了避免对电源的损坏,需设置保护电路的范围。
几乎所有的电源都具有以下特点:在超出输出范围时,要么输出保持在大输出值,要么就自行关闭电源。某些程控电源除可用程序设定输出范围外,还能自动设置电源稳定输出的类型。也就是说,当外电路需要的电压或电流超过设置极限时,电源可自动地由恒压源变成恒流源或由值流源变成恒压源。
4、内部阻抗
相对较大的电源内阻对负载来讲有两点不利,首先是不利于负载稳压电路工作,更为不利的是负载电流的任何变化都会导致直流电源输出的起伏,这种起伏对测试结果的影响同脉冲与噪声对测试结果造成的影响完全相同。
5、稳定度
当线电压或负载电流变化肘,直流电源的输出电压也会有所起伏。稳压程度由稳压电路的参数决定,参数是指滤波电容的容量和能量释放的速率。
如果给电源供电的一个相对恒定的电源,那么只需基本的负载稳压。稳定度的大小一般定义为空载或满载时输出电压的百分比,或电压的变化值。
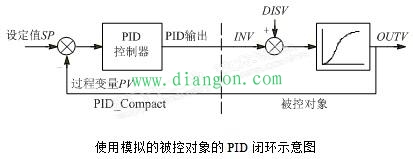
,西门子SITOP电源为用户提供了更稳定更可靠的供电保障。用户通过选择和使用西门子SITOP电源模块,可以为自动化控制系统的供电提供强有力的支持,从而保证了控制系统的稳定运行。在自动化控制系统电源的配置过程中,用户可以参考本文提供的方式进行配置我分别用硬件CPU 1516-3PN/DP和仿真plc与FB“被控对象”组成虚拟的PID闭环,都成功地实现了PID参数自整定。
在PID整定窗口设置采样时间为0.3s,预调节之前PID的增益为0.3,积分时间为3s,微分时间为0s。
单击采样时间右边的“Start”按钮,启动测量。用右上角的选择框设置调节模式为“预调节”。用I0.0使设定值从0跳变到70%,立即单击“调节模式”区的“Start”按钮,启动预调节。
下图左边是预调节的曲线,红色的是PID的输出值Output,PV是过程变量,SP为阶跃设定值。预调节成功地完成后,下面的状态栏出现“系统已调节”的信息。
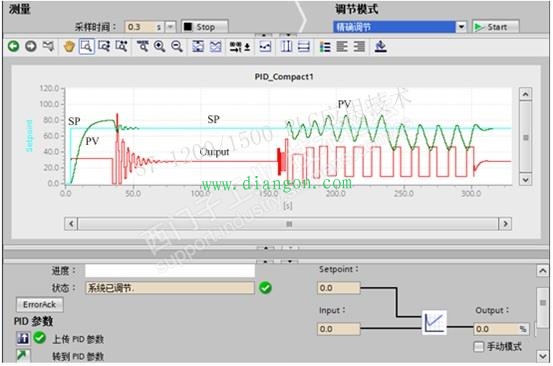
过程变量和设定值曲线基本上重合后,将调节模式修改为“**调节”。单击“调节模式”区的“Start”按钮,启动**调节。经过一段时间后,红色的PID输出曲线以方波波形变换,通过自动控制PID输出的幅值和频率,保证过程变量曲线在设定值水平线上下一定范围内波动。PID输出曲线经过若干次正、负跳变后,**调节结束,下面的状态栏出现“系统已调节”的信息。
**调节成功完成后,单击PID调试窗口下面的“上传PID参数”按钮,将CPU中的PID参数上传到离线的项目中。单击“转到PID参数”按钮,切换到组态窗口PID参数页面,可以看到**调节后CPU中得到的优化的PID参数。
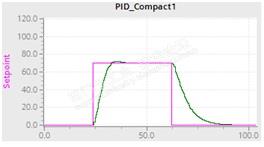
为了观察优化后的参数的控制效果,切换到PID调节窗口。令I0.0为FALSE,过程值下降到0以后,令I0.0为TRUE,使设定值由0跳变到70%,过程变量的响应曲线如下图所示。由图可知优化的PID参数的控制效果是比较理想的。