
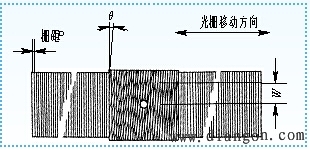
数字式位移传感器有光栅、磁栅、感应同步器等,它们的共同特点是利用自身的物理特征,制成直线型和圆形结构的位移传感器,输出信号都是脉冲信号,每一个脉冲代表输入的位移当量,通过计数脉冲就可以统计位移的尺寸。下面主要以光栅传感器和感应同步器来介绍数字式传感器的工作原理。 1、光栅位移传感器 光栅是一种新型的位移检测元件,有圆光栅和直线光栅两种。它的特点是测量**高(可达±1um)、响应速度快和量程范围大(一般为1—2m,连接使用可达到10m)等。 光栅由标尺光栅和指示光栅组成,两者的光刻密度相同,但体长相差很多,其结构如图1所示。 光栅条纹密度一般为每毫米25,50,100,250条等。把指示光栅平行地放在标尺光栅上面,并且使它们的刻线相互倾斜一个很小的角度
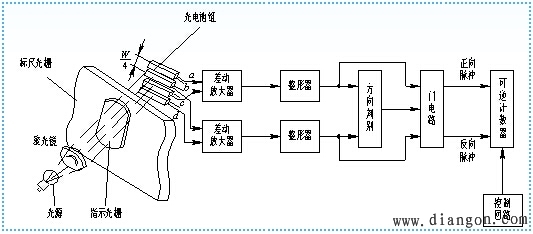
图1 光栅测量原理 图2 莫尔条纹示意 光栅莫尔条纹的特点是起放大作用,用W表示条纹宽度,P表示栅距, 若P=0.01mm,把莫尔条纹的宽度调成l0mm,则放大倍数相当于1000倍,即利用光的干涉现象把光栅间距放大1 000倍,因而大大减轻了电子线路的负担。 光栅可分透射和反射光栅两种。透射光栅的线条刻制在透明的光学玻璃上,反射光栅的线条刻制在具有强反射能力的金属板上,一般用不锈钢。 光栅测量系统的基本构成如图3所示。光栅移动时产生的莫尔条纹明暗信号可以用光电元件接受,图3中的a,b,c,d是四块光电池,产生的信号,相位彼此差900,对这些信号进行适当的处理后,即可变成光栅位移量的测量脉冲。
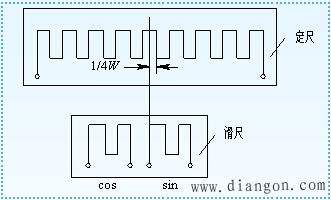
图3 光栅测量系统 2、感应同步器 感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用作检测直线位移和转角。 直线感应同步器由定尺和滑尺两部分组成。定尺较长(200mm以上,可根据测量行程的长度选择不同规格长度),上面刻有均匀节距的绕组;滑尺表面刻有两个绕组,即正弦绕组和余弦绕组,见图4。当余弦绕组与定子绕组相位相同时,正弦绕组与定子绕组错开1/4节距。滑尺在通有电流的定尺表面相对运动,产生感应电势。
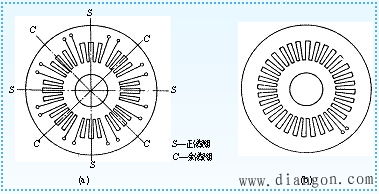
图4 感应同步器原理图 圆盘式感应同步器,如图5所示,其转子相当于直线感应同步器的滑尺,定子相当于定尺,而且定子绕组中的两个绕组也错开1/4节距。
图5 圆盘式感应同步器摇组图形 (a)定子;(b)转子 感应同步器根据其激磁绕组供电电压形式不同,分为鉴相测量方式和鉴幅测量方式。 (1)鉴相式 所谓鉴相式就是根据感应电势的相位来鉴别位移量。 如果将滑尺的正弦和余弦绕组分别供给幅值、频率均相等,但相位相差900的激磁电压,即
图6 滑尺摇组位置与定尺感应电势幅值的变化关系 图6说明了感应电势幅值与定尺和滑尺相对位置的关系。如果只对余弦绕组A加交流激磁电压VA,则绕组A中有电流通过,因而在绕组A周围产生交变磁场 在图中1位置,定尺和滑尺绕组A完全重合,此时磁通交链*多,因而感应电势幅值*大。在图中2位置,定尺绕组交链的磁通相互抵消,因而感应电势幅值为零。滑尺继续滑动的情况见图中3,4,5位置。可以看出,滑尺在定尺上滑动一个节距,定尺绕组感应电势变化了一个周期,即 式中 K——滑尺和定尺的电磁耦合系数; 若绕组的节距为W,相对位移为l,则 同样,当仅对正弦绕组B施加交流激磁电压 对滑尺上两个绕组同时加激磁电压,则定尺绕组上所感应的总电势为
从上式可以看出,感应同步器把滑尺相对定尺的位移L的变化转成感应电势相角 (2)鉴幅式 在滑尺的两个绕组上施加频率和相位均相同,但幅值不同的交流激磁电压 式中 设此时滑尺绕组与定尺绕组的相对位移角为 上式把感应同步器的位移与感应电势幅值 |
 ,这时在指示光栅上就出现几条较粗的明暗条纹,称为莫尔条纹。它们是沿着与光栅条纹几乎成垂直的方向排列,如图2所示。
,这时在指示光栅上就出现几条较粗的明暗条纹,称为莫尔条纹。它们是沿着与光栅条纹几乎成垂直的方向排列,如图2所示。
 (1)
(1)
 ,
, 时,则定尺上的绕组由于电磁感应作用产生与激磁电压同频率的交变感应电势。
时,则定尺上的绕组由于电磁感应作用产生与激磁电压同频率的交变感应电势。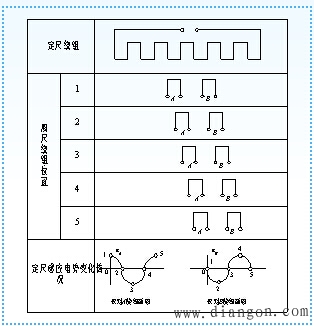
 (2)
(2) (3)
(3) 时,定尺绕组感应电势为
时,定尺绕组感应电势为 (4)
(4) (5)
(5) (6)
(6) 和
和 (7)
(7) (8)
(8) --指令位移角。
--指令位移角。 (9)
(9) 联系起来,当
联系起来,当 时,e=0。这就是鉴幅测量方式的基本原理。
时,e=0。这就是鉴幅测量方式的基本原理。
接口模块,用于 SIMATIC ET 200pro、带集成故障安全 CPU
CPU,带相当于 CPU S7-315F PN/DP 的 PLC 功能;
带分布式智能预处理功能
用于建立故障安全型自动化系统,适用于增安要求的工厂
符合标准 IEC 61508、IEC 62061 的安全要求 SIL 3 以及标准 ISO 13849.1:2006 的安全要求 PL e
用于 ET 200pro 中的高性能控制解决方案
提高了系统和设备的可用性
集成 Web 服务器,带创建用户自定义 Web 页面的选项
经由 PRIFIBUS 或 PROFINET 的等时同步模式
用于多达 128 个 IO 设备的 PROFINET IO 控制器
PROFINET 接口,带集成 3 端口交换机
具有多种通信功能:
编程器/OP 通信、PROFINET IO、ROFINET CBA、开放式 IE 通信(TCP、ISO-on-TCP 和 UDP)、Web 服务器和 S7 通信(带可装载函数块)
通过 STEP 7 的模块化程序,可快速、简单和点对点地对系统进行编程
紧凑型 SIMATIC 微型存储器卡 (MMC)
注:
CPU 运行需要 SIMATIC 微型存储卡。

选择压力传感器时,要考虑其综合精度,而压力传感器的精度受哪些影响呢?其造成传感器误差的因素有很多,压力传感器无法避免的4种误差如下所述: 1、灵敏度误差:产生误差大小与压力成正比。如果设备的灵敏度高于典型值,灵敏度误差将是压力的递增函数。如果灵敏度低于典型值,那么灵敏度误差将是压力的递减函数。该误差的产生原因在于扩散过程的变化。 2、偏移量误差:由于压力传感器在整个压力范围内垂直偏移保持恒定,因此变换器扩散和激光调节修正的变化将产生偏移量误差。 3、滞后误差:在大多数情形中,压力传感器的滞后误差完全可以忽略不计,因为硅片具有很高的机械刚度。一般只需在压力变化很大的情形中考虑滞后误差。 4、线性误差:这是一个对压力传感器初始误差影响较小的因素,该误差的产生原因在于硅片的物理非线性,但对于带放大器的传感器,还应包括放大器的非线性。线性误差曲线可以是凹形曲线,也可以是凸形曲线称重传感器。 |
